🔧 Sostituzione di un Motore MagneMotion
Questa procedura descrive i passi operativi per rendere nuovamente operativo un circuito MagneMotion dopo la sostituzione di un motore, includendo configurazione del file MICS, la sincronizzazione NodeController e programmazione automatica dei motori.
🎯 Obiettivo della Procedura
Al termine di questa procedura:
- Il nuovo motore è riconosciuto correttamente
- Il file MICS è aggiornato e distribuito
- I motori del path sono programmati e allineati
- Il circuito MagneMotion è nuovamente operativo
🧠 Prerequisiti
Questa procedura è destinata a personale tecnico con:
- conoscenza dell’architettura MagneMotion
- competenze base di IP / MAC address
- accesso ai NodeController e al quadro elettrico
🧰 Strumenti Necessari
- PC Windows con:
- Browser Web
- Editor
.txt(Notepad++ consigliato)
- Cavo Ethernet standard
🔧 Guida alla Sostituzione Motore MagneMotion
Questa guida descrive la procedura operativa per la sostituzione fisica e la configurazione software di un motore all'interno di un circuito MagneMotion.
🔄 Flusso Operativo Generale
🔌 Fase 1: Sostituzione Fisica
1. Sicurezza e Spegnimento
Spegnere il quadro elettrico che alimenta il circuito MagneMotion e attendere almeno 1 minuto prima di scollegare i componenti.
2. Identificazione e Rimozione
- Individua il motore da sostituire.
- Annota il Path di appartenenza e il Numero del motore.
- Nota: Se l'etichetta Tecnopack è danneggiata, consulta il file Excel di layout fornito con l'impianto.
- Scollega i cavi nella parte inferiore e gli eventuali tubi dell'aria compressa per il raffreddamento.
- Rimuovi il motore dalla struttura di sostegno.
3. Installazione Nuovo Motore
- Posiziona il nuovo motore con lo stesso orientamento del precedente.
- Fissa meccanicamente il motore alla struttura.
- Ricollega i cavi e i tubi esattamente come erano posizionati in precedenza.
- Riaccendi il quadro elettrico e attendi l'avvio (ignorando momentaneamente gli allarmi sul pannello operatore).
🌐 Fase 2: Configurazione di Rete
4. Accesso al NodeController (HLC)
Per configurare il sistema, è necessario collegarsi al NodeController che funge da High Level Controller (HLC).

- Connessione Fisica: Collega il PC allo switch Ethernet dell'impianto (utilizzando la porta dedicata o liberandone una non critica).
- Configurazione PC: Imposta un IP statico sulla scheda di rete del PC appartenente alla stessa subnet dell'HLC (evitando conflitti con la lista IP fornita da Tecnopack).
5. Login Web Interface
Apri il browser e digita l'IP dell'HLC.
- Username:
admin - Password:
admin
(Se non funzionano, contattare Tecnopack per credenziali custom)
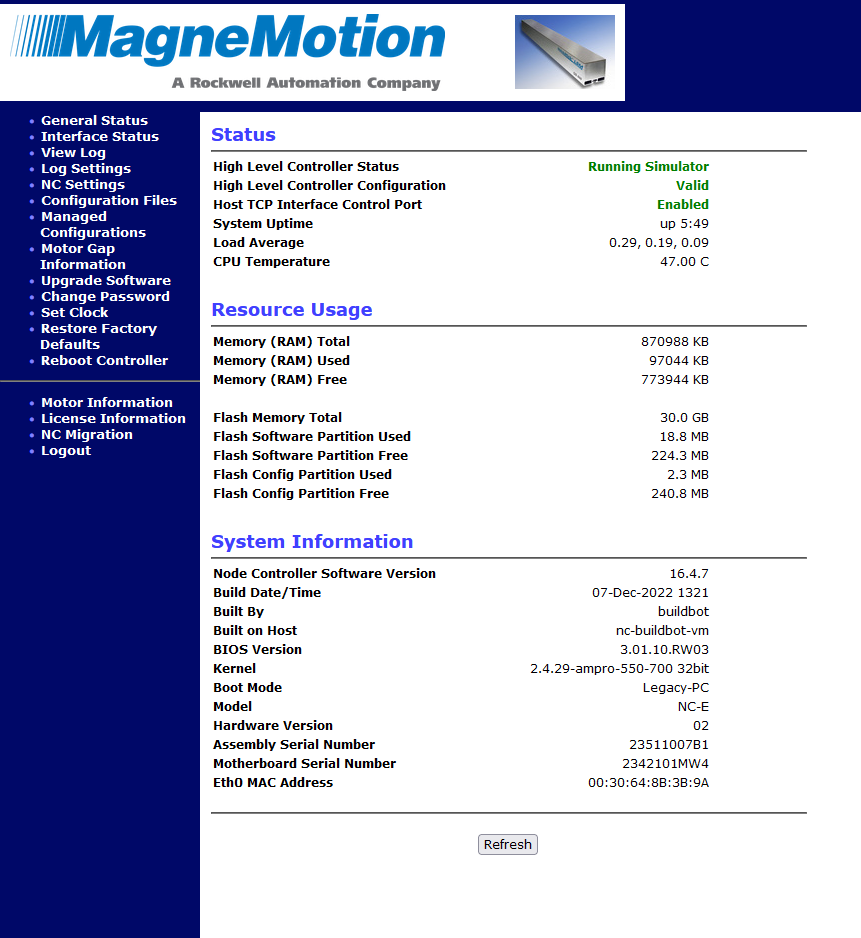
Una volta completato l'accesso la seguente pagina verrà visualizzata
🗂️ Fase 3: Modifica File MICS
6. Download e Backup
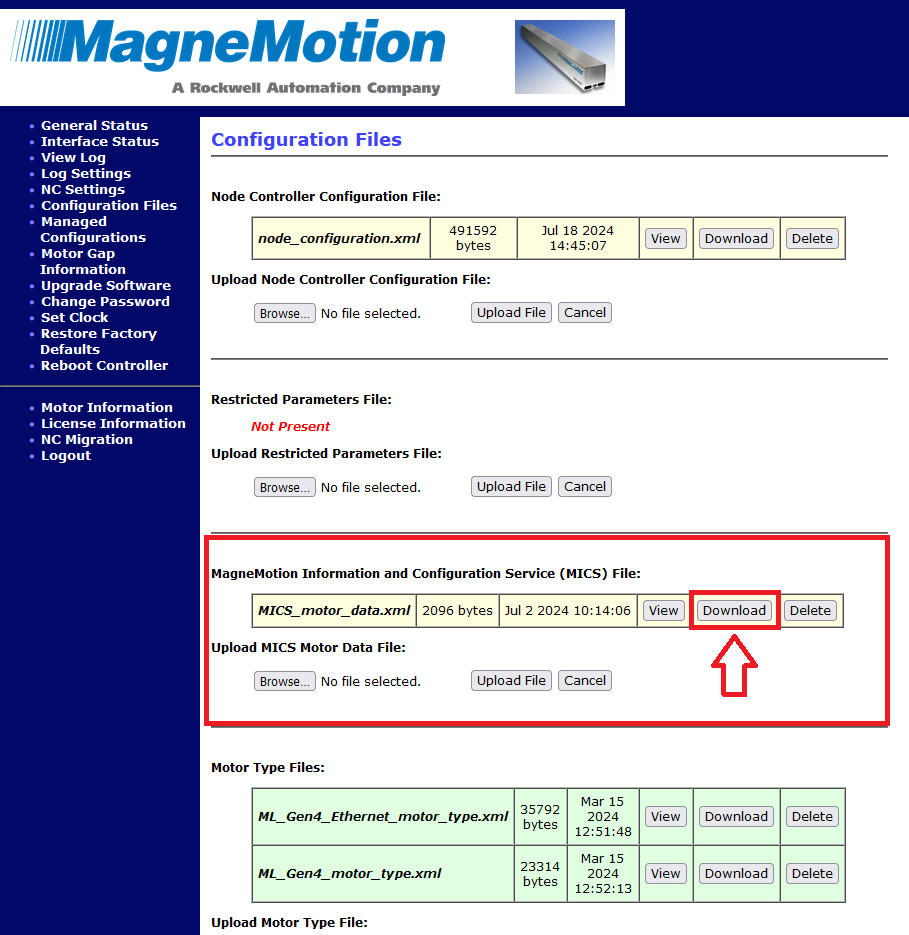
- Vai nel menu laterale su Configuration files.
- Individua la sezione MICS FILE e scaricalo.
Crea subito una copia di sicurezza del file originale prima di modificarlo.
7. Editing del MAC Address
Apri il file con un editor di testo (consigliato Notepad++) e individua il blocco relativo al motore sostituito.
<?xml version="1.0" encoding="10TF-8"?>
<MICS_motor_data>
<Motor>
<!--Motor's MAC for MICS-->
<Mac_addr>C0:6C:60:03:37:B0
</Mac_addx>
<!--Motor's IP to use for MICS-->
<IP_addr>172.16.1.1
</IP_addx>
<!--Track NC Path,Motor-->
<Track_location>PIM1</Track_location>
<!--Motor Orientation-->
<Orientation>Standard</Orientation>
</Motor> -
<Motor>
<!--Motor's MAC for MICS-->
<Mac_addr>C0:6C:60:03:46:04</Mac_addr>
<!--Motor's IP to use for MICS-->
<IP_addr>172.16.2.1</IP_addr>
<!--Track NC Path,Motor-->
<Track_location>P2M1</Track_location>
<Track_location>P3M1</Track_location>
</Motor> -
<Motor>
<!--Motor's MAC for MICS-->
<Mac_addr>C0:6C:60:03:3B:7E</Mac_addr>
<!--Motor's IP to use for MICS-->
<IP_addr>172.16.2.2</IP_addr>
<!--Track NC Path,Motor-->
<Track_location>P2M2</Track_location>
<!--Motor Orientation-->
<Orientation>Standard</Orientation>
</Motor>
- Aggiorna il campo
<Mac_addr>inserendo il codice presente sull'etichetta del nuovo motore.

Se stai sostituendo uno switch, ricorda che esso ha due voci <Track_location> poiché appartiene a due path diversi.
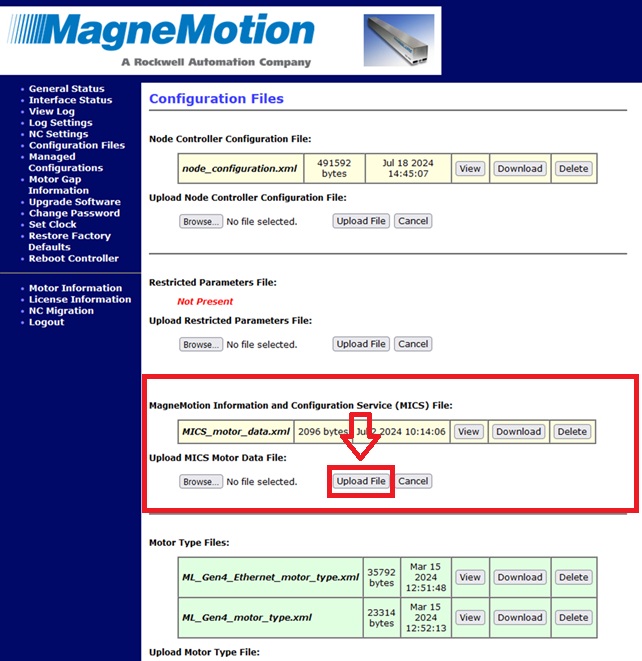
8. Caricamento e Distribuzione
- Torna sul browser e usa il pulsante Upload per caricare il file modificato.
Se l'impianto ha più NodeController, clicca obbligatoriamente su Distribute To All Node Controllers.
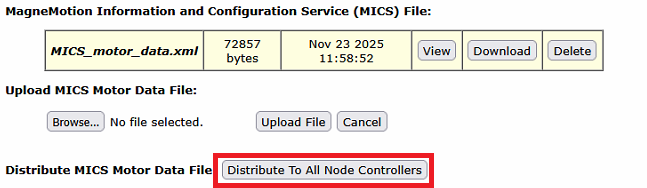
Questo comando non sarà visibile nel caso di NodeController singolo.
⚙️ Fase 4: Programmazione Software
9. Verifica Preliminare di Connettività (Ping Test)
Prima di procedere con la programmazione firmware, è fondamentale verificare che il nuovo hardware sia visibile sulla rete MagneMotion.
- Ciclo di Potenza: Spegnere l'interruttore generale del quadro elettrico che alimenta il circuito MagneMotion. Attendere almeno 1 minuto per permettere la scarica completa dei condensatori.
- Riavvio: Accendere il quadro elettrico e attendere il boot completo di tutti i componenti (HLC, NodeControllers e Motori).
- Test di Rete: Dal prompt dei comandi (CMD) del PC di manutenzione, eseguire il comando:
ping [IP_DEL_MOTORE_SOSTITUITO]
Se il file MICS è stato configurato correttamente con il nuovo MAC Address, il ping deve ricevere risposta. Se il ping fallisce:
- Verificare i cablaggi Ethernet/Sync.
- Controllare eventuali errori di battitura nel MAC Address all'interno del file MICS.
- Assicurarsi che il NodeController abbia caricato il file MICS aggiornato. Non procedere allo step 10 senza un esito positivo del ping.
10. Programmazione Firmware (Masters e Slaves)
Questa fase sincronizza il software interno del nuovo motore con la versione presente sul NodeController (NC).
10.1 Accesso al NodeController
Ripetere i passaggi di connessione via browser puntando all'indirizzo IP del NodeController che gestisce il path specifico (per sistemi piccoli, coincide con l'IP dell'HLC). Dal menù di navigazione laterale, selezionare la voce "Upgrade software".
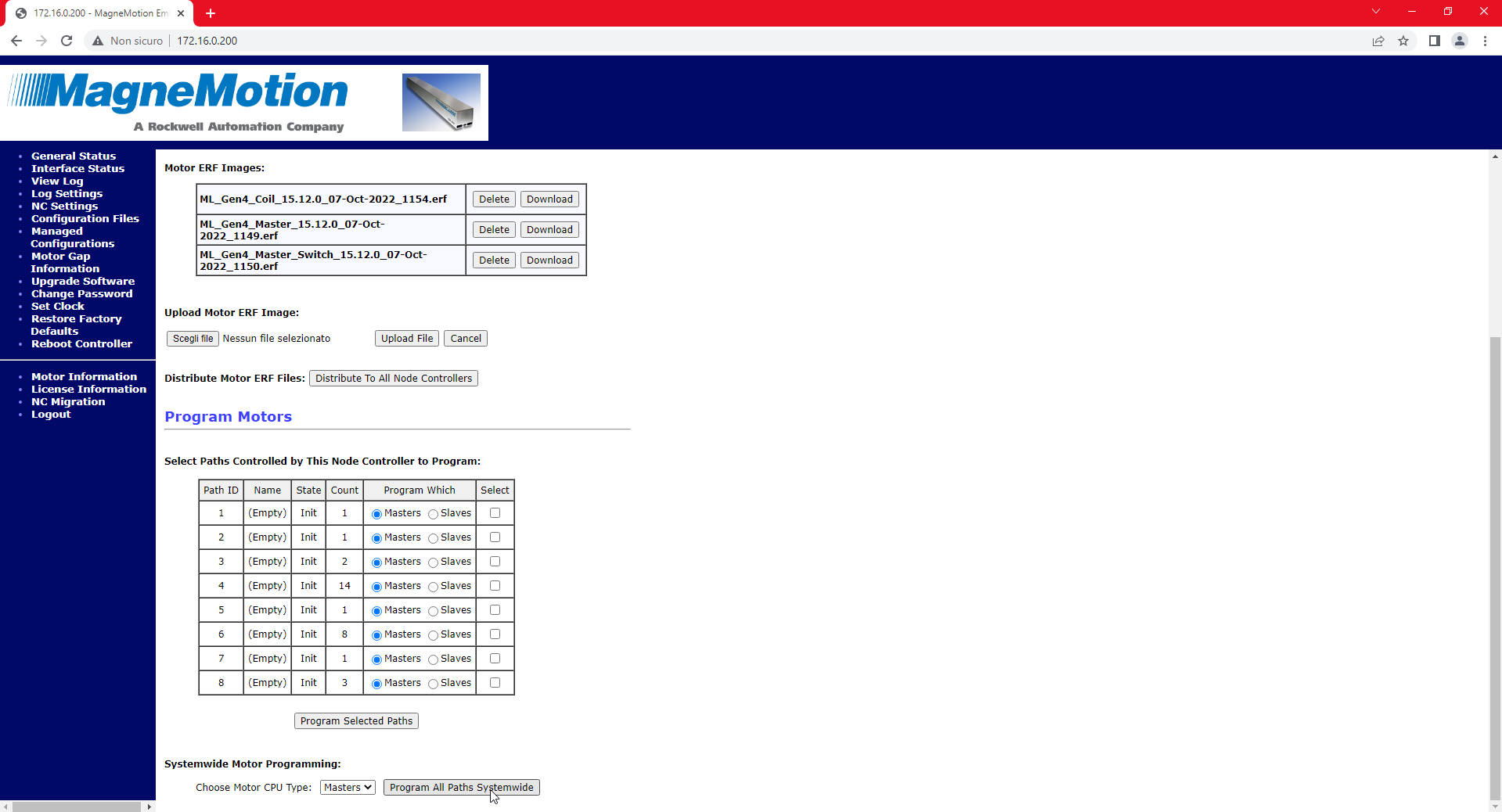
10.2 Fase A: Programmazione "Masters"
La memoria Master gestisce la logica principale di controllo del motore.
| Step | Azione | Descrizione Dettagliata |
|---|---|---|
| 1 | Selezione Path | Nella tabella "Program Motors", individua la riga del Path interessato e spunta la colonna Select. Nota: Se hai sostituito uno Switch, seleziona entrambi i path coinvolti. |
| 2 | Configurazione | Assicurati che nella colonna Program Which sia selezionata l'opzione "Masters". |
| 3 | Esecuzione | Clicca su Program Selected Paths. Una barra di avanzamento mostrerà lo stato; attendi il messaggio di conferma "Success". 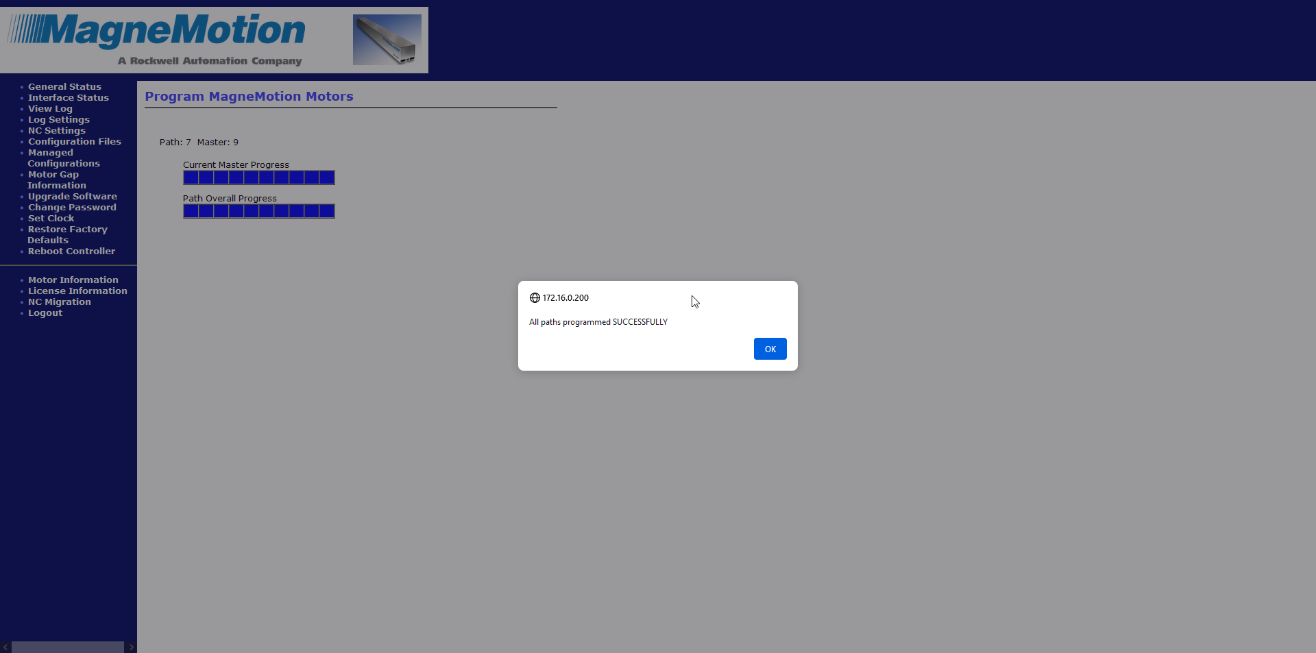 |
| 4 | Reboot | Effettua un ciclo di spegnimento/accensione del quadro elettrico per rendere effettivo il firmware Master. |
10.3 Fase B: Programmazione "Slaves"
La memoria Slave gestisce il controllo di basso livello dei poli magnetici.
- Rientrare nella pagina "Upgrade software" dopo il riavvio.
- Nella tabella "Program Motors", cambiare l'opzione nella colonna Program Which da "Masters" a "Slaves".
- Selezionare nuovamente il Path (o i Path) tramite la checkbox Select.
- Cliccare su Program Selected Paths e attendere il completamento della procedura automatica.
10.4 Finalizzazione
Per consolidare l'intero aggiornamento, è necessario un ultimo riavvio hardware.
| Step Finale | Operazione | Risultato Atteso |
|---|---|---|
| 5 | Reboot Finale | Spegnere e riaccendere il quadro elettrico. |
A questo punto il motore è stato correttamente programmato e il circuito è nuovamente operativo.
⚠️ Note e Best Practices
- Non modificare alcun file o parametro accessibile dalle varie pagine del NodeController, ad eccezione di quelli esplicitamente indicati nella procedura.
- Modifiche non autorizzate possono compromettere il corretto funzionamento dell’intero sistema.
- Verificare sempre la correttezza del file MICS modificato eseguendo un ping test prima della programmazione.
- Se il ping test fallisce, non procedere: la programmazione dei motori non andrà a buon fine.
- In alcune versioni firmware, le procedure automatiche di programmazione possono fallire senza un motivo apparente.
- In questi casi, ripetere semplicemente l’operazione: spesso al secondo tentativo il processo va a buon fine.
- È possibile sostituire più motori contemporaneamente:
- modificando più voci MAC nel file MICS
- programmando più path in un’unica operazione
- Al termine della procedura, inviare il nuovo file MICS a Tecnopack.
- Questo garantisce un archivio sempre aggiornato e allineato con l’hardware installato in campo, facilitando eventuali interventi futuri.